������Ϣ
���x������������S����Ӽ��g�����������g�Ϳ��Ƽ��g�ȼ��g�İlչ������o�˙C�����Ƽ������ѽ��ɞ��˟o�˙C�о��ğ��c��������o�˙C���������������c���ݣ������ü��̘I��;����õ��ˏV��S�̵���A�������Զ�����o�˙C�錦������Ŀǰȫ�������o�˙C�I������P�����F�
01 ������o�˙C�İlչ�vʷ
����1907�꣬Breguet �ֵ�Louis ��Jacque �ڷ����ƌW��Charles Richet ��ָ���£��OӋ�����������ϵ�һ�������{�Ķ������w�C����������Cһ̖����
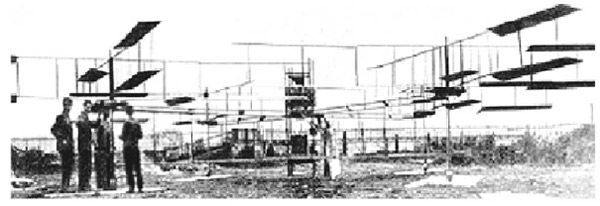
�D��������Cһ̖
�����������ڮ��r���g�����ƣ��o�����F�w�C�Ŀ��ƣ��������İlչ��һֱ̎��ͣ����B������ʮ���o��ʮ����Ժ��S��MEMS���g���oˢ늙C���g��̎�����g�İlչ��С�Ͷ�����o�˙C�������M���˂���ҕҰ��
����2002�꣬�Ĵ�����������W��Pounds P�����аl��һ������X-4 Flyer Mark��������o�˙C����������������Wģ�ͺͿ���ϵ�y��2006�꣬ᘌ�ԓ�w�����OӋ��һ�N����SISO�������������w�����ˑB��2010�꣬X-4 Flyer Mark2�������w�����ij��F�����|����4Kg���d�����_1Kg�����Ҍ��F���҃����ƽ���w�С�
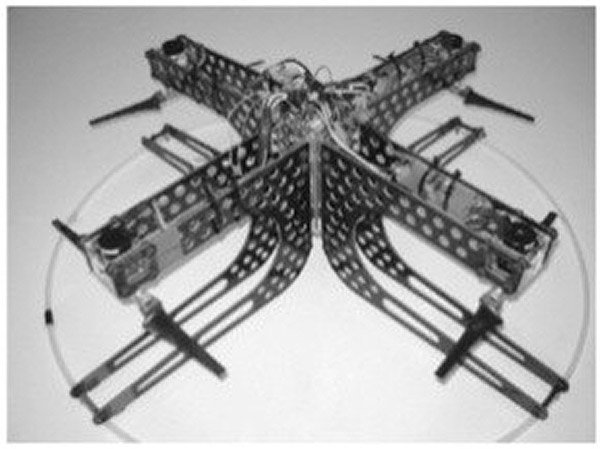
�D����������o�˙C
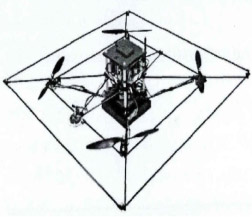
����2005�꣬�eϦ���၆��W�о��Fꠣ����㷨�������ɂ��z��C�ϣ�ͨ�^�z��C�ṩ��ҕ�X�������������w�����M���˿��ơ���ʿ��Ƽ��WԺ��Bouabdallah�о��Fꠌ��ɷN�Ǿ��ԵĿ��Ʒ��������������ƺͻ�Ĥ׃�Y�����Ƒ�����OS4ƽ�_��ʹ�w���������^���Ŀ��ɔ_�������D����F꠵��������w����OS4���ƽ�_��

�D�����������w����OS4���ƽ�_
����2005����2011���g������˹̹����WTomlin�Fꠣ��OӋ�Ķ������w���Ƶ��w�����yԇƽ�_STARMAC��ԓ�F��OӋ��ʮ�־��_���w�п����㷨���҈D�քe���������w����ƽ�_STARMAC2��Mesicopter�Ͷ�����o�˙C��
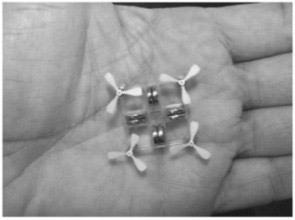
�D�����������w����ƽ�_STARMAC2��Mesicopter�Ͷ�����o�˙C
��������������o�˙C�ă��c����V韵đ���ǰ��ʹ���ɞ�o�˙C�о��I���һ�����c��������ЙC����������һ�ɶ������о��ğᳱ����������IҲ�dzɹ��аl��������������o�˙C����������o�˙C��u�������Ј����Ķ����F�˶�����o�˙C�Č������������ĸ����I��
�����D�քe�ǴƼ���PARROT�Լ������ع�˾�Ď������o�˙C��

��������o�˙C

��MG-1�r�Iֲ���C

PARROT BEBOP 2FPV

PARROT AR. DRONE2.0

������EWZ-S8

������EWZ-D6
�D��������̖�o�˙C�������DƬ��Դ�ھW�j��
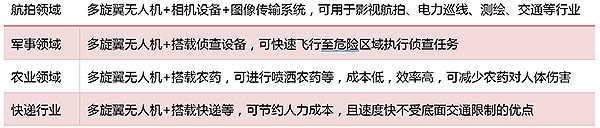
02 ������o�˙C�����c���䑪���I��
����������o�˙C���^�������o�˙C���е��쪚��ă��ݣ��c�̶����w�C��ȣ������п��Դ�ֱ�����Զ��c�P���ă��c���c������ֱ���C��ȣ������ßoˢ늙C������������қ]��β���b�ã���˾��ЙCе�Y�����Ρ���ȫ�Ըߡ�ʹ�óɱ��͵ȃ��c��������o�˙C���T�����cʹ���������I��@���ˏV���đ��ã�
����������o�˙C�đ����I��
03 ������o�˙C�����B��
3.1 ȫ����څ�ݷ���

�D����ȫ������Ոڅ��
�������ψD�@ʾ�Ĕ�����֪�������������o�˙C����Ո�����L���ټӿ졣��2002�굽2009�꣬������o�˙C�I��Č�����Ո�����w�ϳʬFƽ��څ�ݣ���2009����2013��ʾ������Lڅ�ݡ���2014����2016�꣬���L����׃�÷dz����ͣ����L�ӿ죬�@��ӳ��������o�˙C�������ڼ������L��2016�꣬ȫ��Ķ�����o�˙C��Ո��ͻ��4000����
3.2 ȫ������Ո�������

�D����ȫ������Ո������r
�����ψDչʾ��ȫ������Ո�У�������o�˙C���P�����Č�����Ո��D����ԓ��D�У��ɫ���{���t��׃���������@�����һ�^�Č�����Ո������u�f�����Ї��Ƕ�����o�˙C������Ո�������ć��ң��@Ҳ�cĿǰ�Ј��϶�����o�˙C��ռ����r���������λ�ڵڶ��������������n�����ձ����W�ޡ����������Լ����_˹���������ҵ����P������Ո�����^�١�
3.3ȫ���������߷���
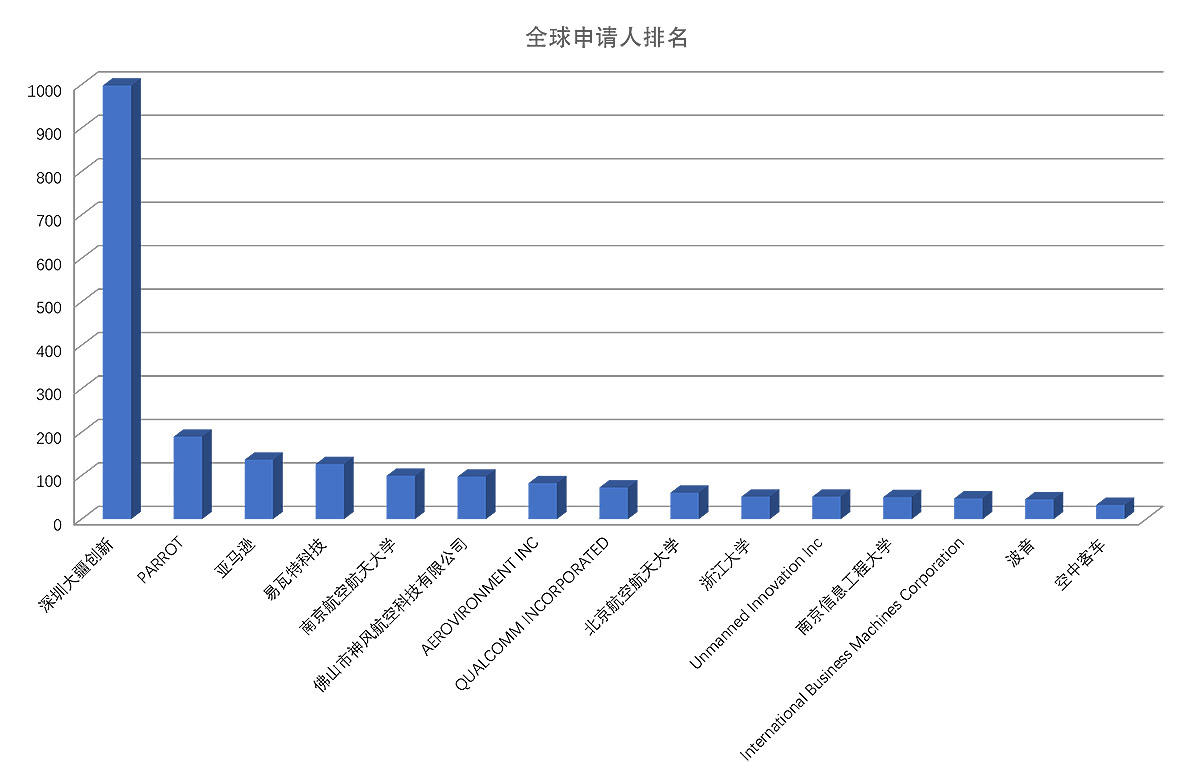
�D����ȫ����������������r
����������ȫ����Ո�������У��@ʾ�˶�����o�˙C���P������Ո��������ǰ15λ����Ո�ˣ�������λ���������д��¿Ƽ�����˾���������o�˙C�Č�����Ո�����h���ڵڶ�λ��PARROT�����Կ�Ҋ���¹�˾�ڶ�����o�˙C�I��Č���������r��λ�ڵ���������λ�ķքe�ǁ��R�d�������ؿƼ��ɷݹ�˾��λ��ǰ15���ж����҇���У���@���Կ����҇���У�ڶ�����o�˙C�I��İlչ��r���v�^������Ո����������֪���҇���ȫ�������o�˙C�I���еĵ�λ��
